Multikopter sistemleri yada modelcilikte kumanda alıcı verici sistemleri yaygın olarak kullanılmaktadır. Çeşitli frekans değerlerinde çalışan bu sistemlerden en yaygın kullanılanı 2.4 GHz frekans değerine sahip olanlardır. Kumandalar pwm (pulse width modulation) yada ppm (pulse position modulation) modülasyon özellikleri ile çalışmaktadır. PWM yada PPM sistemlerini ileriki çalışmalarda detaylı bir şekilde inceleyeceğiz. Bu çalışmada kumandanın nasıl bir sinyal gönderdiğini ve bu sinyalin hangi değerler arasında olduğunu inceleyeceğiz.
Kumanda üzerinde bulunan joystick yada switchler kanallara atanmıştır. Bazılarında ise kanallara atama olayını kullanıcılar yapar. Bir multikopterin kontrol edilebilmesi için en az 4 kanallı kumandaya ihtiyaç vardır.
Kanallardan gelen sinyallere çoğu çalışmada ihtiyaç duyulmaktadır. Multikopterin farklı kontrol çalışmalarında, android kontrollerinde bu verilere ihtiyaç duyulmaktadır. Bu veriler basit bir şekilde arduino kartları ile okunabilmektedir. İlgili kod aşağıda bulunmaktadır. Receiverdan gelen değer analogRead fonksiyonu ile okunamaz. Çünkü PWM yada PPM sinyali ile çalışılır. Yani okunması gereken sinyalin HIGH yada LOW olma süresi okunmalıdır. Bunu okuyabilmek için arduino da özel bir fonksiyon vardır. Aşağıdaki kodda "pulseIn" fonksiyonu sinyalin HIGH olduğu durumları saymaktadır.
Kod:
int pin = 7; // değeri okunmak istenen receiver pini
unsigned long duration;
void setup()
{
Serial.begin(9600);
pinMode(pin, INPUT);
}
void loop()
{
duration = pulseIn(pin, HIGH); // pulse' in HIGH olması durumunda sayar
Serial.println(duration);
}

Bu blogda Arduino, Android ve çok motorlu mini İHA' lar üzerine yapılan çalışmalar yer almaktadır. Basit Arduino uygulamaları ile bu işe ilk başlayanlara rehber olabilecek örnekler, çeşitli platformlarda hazırlanmış Android uygulamaları ve İHA sistemleri incelenmiştir.
10 Mayıs 2014 Cumartesi
4 Mart 2014 Salı
MIT Application İle Android Uygulaması - Lamba Kontrolü
Bu yazımızda daha önceden eclipse ile yazmış olduğumuz android uygulamasının mit app. inv. ile yapılmasını inceleyeceğiz. MIT app. inv. 'dan yeni proje dosyası açarak başlayabiliriz.
Şekil 1' de verilen uygulama görüntüsü sol kısımda bulunan aygıtların ekran içerisine sürüklenmesi ile yapılır. Bluetooth bağlantısı için yaygın olarak kullanılan "List Picker" seçilmiştir. Ekranda gösterilmesi istenen yazılar için "Label" aygıtı kullanılır. Lambaların kontrol edilebilmesi için butonlar kullanılır. Bu istenen aygıtlar sürüklenerek ekrana yerleştirilir. Ekranın arka plan, yön yada diğer özellikleri sol kısımdaki "Properties" alanından ayarlanır.

Şekil 1' de verilen uygulama görüntüsü sol kısımda bulunan aygıtların ekran içerisine sürüklenmesi ile yapılır. Bluetooth bağlantısı için yaygın olarak kullanılan "List Picker" seçilmiştir. Ekranda gösterilmesi istenen yazılar için "Label" aygıtı kullanılır. Lambaların kontrol edilebilmesi için butonlar kullanılır. Bu istenen aygıtlar sürüklenerek ekrana yerleştirilir. Ekranın arka plan, yön yada diğer özellikleri sol kısımdaki "Properties" alanından ayarlanır.
Şekil 1
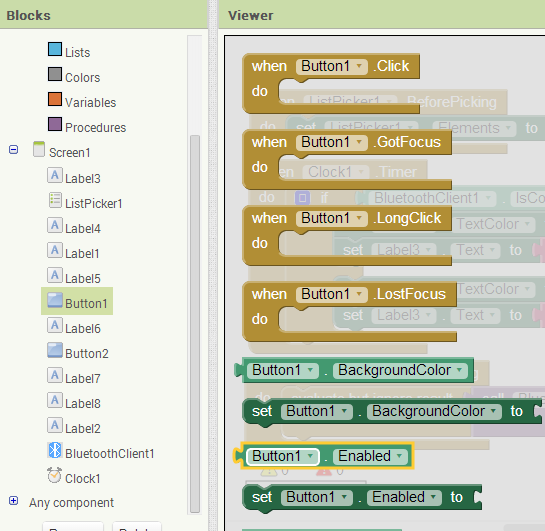
Ekrana yerleştirilen bu aygıtların ne şekilde kontrol edileceği kısmı "Blocks" çalışma alanında bloklarla olacaktır. Mesela butona basıldığında ne yapılması isteniyorsa "When Click do" yapısı blok sayfasından buton üzerine tıklanarak seçilir. Şekil 2 de bu gösterilmiştir.
Şekil 2
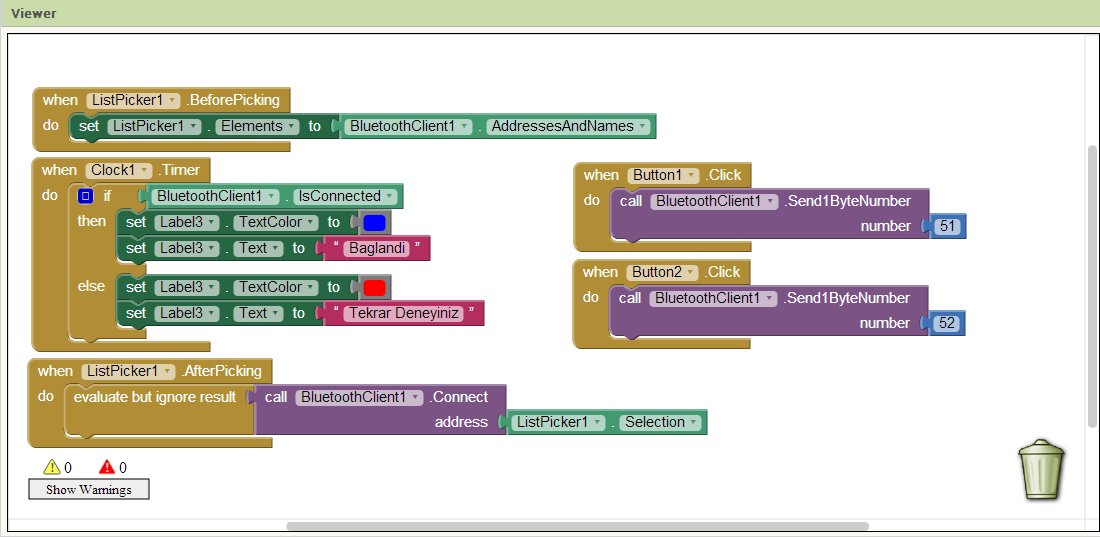
Hazırlanan bu uygulamanın kontrol blok şeması Şekil 3' de gösterilmektedir.
Şekil 3
Bu uygulamada android ile lambanın kontrolü için bluetooth haberleşmesi kullanılmıştır. Bluetoothun etkinleştirilmesi List Picker ve Clock ile ile ilgili komutlarla sağlanmıştır.
Buton1 lambanın açılması için, Buton2 lambanın kapatılması için kullanılmıştır. Kontrol blok diagramında Buton1' e basıldığında bluetooth üzerinden 51 sayısı gönderilmekte, Buton2' ye basıldığında 52 sayısı gönderilmektedir. Bu sayıların bu şekilde seçilmesi ASCII tablo karşılıklarının sırasıyla 3 ve 4 olmasıdır. Arduino kısmına yazılacak program içerisinde ascii karşılıkları kullanılacaktır.
Aşağıda arduino kodu yer almaktadır. Uygulama videosu linktedir. Bluetooth aygıtının arduinoya bağlantısı şu şekildedir:
Bluetooth Pin Arduino Pin
Tx Rx
Rx Tx
Vcc Vcc
GND GND
int ledpin=13; //led 13. pine bağlanır
//yada 13. pinde bulunan led ile işlem yapılır
char deger; //bluetooth ile gönderilen verinin tutulacağı değişken
void setup()
{
Serial.begin(9600); //seri haberleşme hızı
pinMode(ledpin,OUTPUT); //led pini çıkış olarak ayarlanır
}
void loop()
{
if(Serial.available()>0) //Seri haberleşmeden veri
//gönderilirse bu loop çalışır
{
deger=Serial.read(); // gönderilen değer okunarak deger değişkenine atanır
if(deger=='3') //deger 3 ise yani 51 ise
{
digitalWrite(ledpin,HIGH); //led yanar
}
if(deger=='4') //deger 4 ise yani 52 ise
{
digitalWrite(ledpin,LOW); //led söner
}
}
}
3 Mart 2014 Pazartesi
MIT Application İnventor da Android Uygulaması Geliştirme
Bu zamana kadar android uygulama geliştirme arayüzü için java tabanlı eclipse üzerine kurulu SDK' yı kullanmıştık. Bu yazımızda daha basit bir şekilde uygulama oluşturulabilen MİT Üniversitesi tarafından hazırlanmış app. inv. kullanılacaktır. Daha önceden eclipse üzerinde yaptığımız aynı uygulamaların bu arayüz ile daha basit bir şekilde yapıldığını göreceğiz.
Öncelikle mit app. nasıl kullanılacağı hakkında bilgi verelim. Bu linkteki adrese girip sol üst kısmdaki "Create" butonuna tıklanır ve bir hesap ile oturum açılır. Gerekli anketleri doldurmanızı öneririm yoksa her defasında soracaktır. Aslında uygulama oluşturmak için gerekli işlem bu kadar. Ancak yapılan uygulamaların emulator yada usb bağlantısı ile telefon üzerinde çalıştırılabilmesi için bu sayfanın incelenmesi ve ilgili programların (App Inventor Setup, aiStarter) yüklenmesi gerekmektedir.
Bu aşamalardan sonra mit app inv ekranında ne, ne işe yarar bunları inceleyelim. Şekil 1 ' de uygulamanın oluşturulacağı çalışma ekranı gösterilmektedir.

Öncelikle mit app. nasıl kullanılacağı hakkında bilgi verelim. Bu linkteki adrese girip sol üst kısmdaki "Create" butonuna tıklanır ve bir hesap ile oturum açılır. Gerekli anketleri doldurmanızı öneririm yoksa her defasında soracaktır. Aslında uygulama oluşturmak için gerekli işlem bu kadar. Ancak yapılan uygulamaların emulator yada usb bağlantısı ile telefon üzerinde çalıştırılabilmesi için bu sayfanın incelenmesi ve ilgili programların (App Inventor Setup, aiStarter) yüklenmesi gerekmektedir.
Bu aşamalardan sonra mit app inv ekranında ne, ne işe yarar bunları inceleyelim. Şekil 1 ' de uygulamanın oluşturulacağı çalışma ekranı gösterilmektedir.
Şekil 1
Bu ekranın sağ üst kısmında bulunan "My Projects" kısmından yapmış olduğunuz uygulamalara ulaşabilirsiniz. Yine sağ üstte bulunan "Designer" uygulamanın görsel kısmının oluşturulduğu çalışma sayfasını "Blocks" oluşturulacak uygulamada kullanılan buton, label vs. gibi aygıtların kontrol işlemlerin yapıldığı blok kodlama alanını açmaktadır. Üst kısımda bulunan "Build" butonu sayesinde hazırlanan uygulama bilgisayara indirilebilir yada QR kodu oluşturulabilir. Connect butonu sayesinde uygulamanın telefonda yada emulatörde çalıştırılması sağlanır. "Projects" butonu ile hazırlanan projelere ulaşılınabilinir, yeni proje yapılabilinir, internettten indirilmiş yada bir şekilde temin edilmiş proje kaynak dosyaları çalıştırılabilinir.
Çalışma sayfasının "Palette" başlığı altında bulunan aygıt isimleri sürüklenerek ekrana taşınır. Örneğiş Şekil 1' de Screen1 'e 1 adet buton eklenmiştir. Bu sol kısımdaki "User Interface" başlığı altındaki "Button" imgesinin Screen 1 içerisine sürüklenmesiyle yapılmıştır. Sağ kısımda bulunan "Properties" başlığı altındaki imgeler ile ekranda seçili aygıtların genişlik, uzunluk, renk, şekil, yazı boyutu veya rengi gibi temel özellikleri değiştirilebilmektedir. Bu alanda seçilen malzemenin boyutlarının belirlenmesinde önemli bir husus bulunmaktadır. "Width" yada "Height" başlıkları altından seçilen aygıtın (mesela buton) ekranda ne kadarlık alanı kaplayacağını 3 farklı seçenek ile belirleyebiliriz. Bunlar: Automatic, Fill parents, pixeldir. Bunlardan Fill parent seçilen aygıtın ekranın genişliğini yada uzunluğunu kaplaması için kullanılır. Pixel ise istenilen ölçülerde ne kadarlık piksel kaplayacağını yazmamızı sağlar.
Eclipse ile Android Uygulama Geliştirme
İlk olarak Eclipse açılır. Sağ üstte “File>New>Android Application Project” seçilir. Açılan sayfaya uygulama adı girilir. Oluşturulacak uygulamanın hangi sürümler için kullanılacağı seçilir. Aynı sayfadan kullanılacak tema da seçilebilir. İleri butonuna tıklanır. Yapılacak uygulamanın kayıt edileceği alan Location kısmından seçilir. İleri butonuna tıklanır. Açılan sayfadan uygulama sağ üst kısmında simgelenecek iconun resmi ve boyutları seçilir. Farklı bir resim konulmak istenirse bu “İmage File” yanındaki “Browse” butonuna tıklanarak yapılır. İleri butonuna tıklanır. Şimdilik Blank Activity seçimine ellemeyerek ileri butonuna tıklanır ve açılan sayfada “Finish” butonuna tıklanarak ilk uygulama yapılmaya başlanır.
Eclipse üzerinde açılan çalışma sayfasının sağ tarafında “Package Explorer” kısmı altında oluşturulan uygulama ile ilgili kaynak dosyalar bulunur. Bunların içerisinden sırasıyla “res>layout>……xml” dosyası seçilir. Bu kısmın yanında bir ekran açılır (Şekil 1). Açılan bu ekrana sol kısımda “Palette” linki altındaki elemanlar sürüklenerek yerleştirilir. Böylece uygulama sayfası oluşturulur.


Eclipse üzerinde oluşturulan uygulamaların çeşitli aygıtları kontrol edebilmesi için, uygulamada kullanılan butonlara, side sticklere, slide barlara çeşitli pinler yada numaralar atanmalıdır. Bu işlem res klasörü altındaki activitymain.xml dosyası içerisinde kod yazarak yapılır. Bir buton ve slide bar içeren kod şu şekilde yazılabilir.
<RelativeLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:paddingBottom="@dimen/activity_vertical_margin"
android:paddingLeft="@dimen/activity_horizontal_margin"
android:paddingRight="@dimen/activity_horizontal_margin"
android:paddingTop="@dimen/activity_vertical_margin"
tools:context=".MainActivity" >
<TextView
android:id="@+id/textView1"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="@string/hello_world" />
<Button
android:id="@+id/button1"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_alignLeft="@+id/textView1"
android:layout_below="@+id/textView1"
android:layout_marginLeft="47dp"
android:layout_marginTop="21dp"
android:text="@string/Button" />
<ProgressBar
android:id="@+id/progressBar1"
style="?android:attr/progressBarStyleLarge"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_below="@+id/button1"
android:layout_marginTop="56dp"
android:layout_toRightOf="@+id/button1" />
</RelativeLayout>
Yukarıdaki kodta kullanılacak elemanlar ile ilgili tanımlamalar yapılmıştır. Bu tanımlamalar kullanılacak elemanın genişliği, boyu, rengi, ekranın hangi kısmında olacağı vs. ile ilgilidir.
Oluşturulan uygulamanın Android bir telefon yada emulator denilen bilgisayar üzerinde oluşturulan sanal telefon ekranında oynatılması için Eclipse araç çubuklarından sırasıyla “Run>Run As>Run Configuration” seçilir. Açılan ekrandan derlenecek ve çalıştırılacak proje seçilir. Target kısmından emulatorde oynatmak için “Automatically pick compatible device: Always…” seçilir, telefonda oynatmak için “ Always prompt to pick device” seçilir ve sırasıyla “Apply>Run” tıklanır. Telefonda uygulamanın çalıştırılması için telefonun bilgisayara bağlantılı olması yeterlidir.
Şekil 3 ve 4 de Eclipse üzerinde yazılan android kontrol ugulamaları mevcuttur. Şekil 4.5 de quadrocopterin androidle kontrolü için oluşturulacak devre tasarımı bulunmaktadır. Kontrolcü olarak Arduino Mega ADK kullanılan bu çizimde android telefon ile haberleşme xbee üzerinden yapılmaktadır. Arduino Mega ADK arduino geliştirme kitlerinin android telefonlar ile uyumlu, USB girişine sahip 2560 işlemcili bir versiyonudur. Xbee düşük güçlü veri aktarım cihazıdır. İki nokta arası yada ikiden fazla nokta arası haberleşme için kullanılırlar.



Eclipse üzerinde açılan çalışma sayfasının sağ tarafında “Package Explorer” kısmı altında oluşturulan uygulama ile ilgili kaynak dosyalar bulunur. Bunların içerisinden sırasıyla “res>layout>……xml” dosyası seçilir. Bu kısmın yanında bir ekran açılır (Şekil 1). Açılan bu ekrana sol kısımda “Palette” linki altındaki elemanlar sürüklenerek yerleştirilir. Böylece uygulama sayfası oluşturulur.
Şekil 1
Şekil 2: Örnek Android Uygulaması
Eclipse üzerinde oluşturulan uygulamaların çeşitli aygıtları kontrol edebilmesi için, uygulamada kullanılan butonlara, side sticklere, slide barlara çeşitli pinler yada numaralar atanmalıdır. Bu işlem res klasörü altındaki activitymain.xml dosyası içerisinde kod yazarak yapılır. Bir buton ve slide bar içeren kod şu şekilde yazılabilir.
<RelativeLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:paddingBottom="@dimen/activity_vertical_margin"
android:paddingLeft="@dimen/activity_horizontal_margin"
android:paddingRight="@dimen/activity_horizontal_margin"
android:paddingTop="@dimen/activity_vertical_margin"
tools:context=".MainActivity" >
<TextView
android:id="@+id/textView1"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:text="@string/hello_world" />
<Button
android:id="@+id/button1"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_alignLeft="@+id/textView1"
android:layout_below="@+id/textView1"
android:layout_marginLeft="47dp"
android:layout_marginTop="21dp"
android:text="@string/Button" />
<ProgressBar
android:id="@+id/progressBar1"
style="?android:attr/progressBarStyleLarge"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_below="@+id/button1"
android:layout_marginTop="56dp"
android:layout_toRightOf="@+id/button1" />
</RelativeLayout>
Yukarıdaki kodta kullanılacak elemanlar ile ilgili tanımlamalar yapılmıştır. Bu tanımlamalar kullanılacak elemanın genişliği, boyu, rengi, ekranın hangi kısmında olacağı vs. ile ilgilidir.
Oluşturulan uygulamanın Android bir telefon yada emulator denilen bilgisayar üzerinde oluşturulan sanal telefon ekranında oynatılması için Eclipse araç çubuklarından sırasıyla “Run>Run As>Run Configuration” seçilir. Açılan ekrandan derlenecek ve çalıştırılacak proje seçilir. Target kısmından emulatorde oynatmak için “Automatically pick compatible device: Always…” seçilir, telefonda oynatmak için “ Always prompt to pick device” seçilir ve sırasıyla “Apply>Run” tıklanır. Telefonda uygulamanın çalıştırılması için telefonun bilgisayara bağlantılı olması yeterlidir.
Şekil 3 ve 4 de Eclipse üzerinde yazılan android kontrol ugulamaları mevcuttur. Şekil 4.5 de quadrocopterin androidle kontrolü için oluşturulacak devre tasarımı bulunmaktadır. Kontrolcü olarak Arduino Mega ADK kullanılan bu çizimde android telefon ile haberleşme xbee üzerinden yapılmaktadır. Arduino Mega ADK arduino geliştirme kitlerinin android telefonlar ile uyumlu, USB girişine sahip 2560 işlemcili bir versiyonudur. Xbee düşük güçlü veri aktarım cihazıdır. İki nokta arası yada ikiden fazla nokta arası haberleşme için kullanılırlar.
Şekil 3: Android Lamba Kontrol Uygulaması
Şekil 4: Android Araba Kontrol Uygulaması
Şekil 5: Quadrocopter Bağlantı Şeması
Android, Android SDK Kurulumu
Android, Google, Open Handset Alliance ve özgür yazılım topluluğu tarafından geliştirilen, Linux tabanlı, mobil cihaz ve cep telefonları için geliştirilmekte olan, açık kaynak kodlu bir mobil işletim sistemidir. Java üzerine kurulu bir platformdur.
Android, linux çekirdeği üzerine inşa edilmiş bir mobil işletim sistemidir, bu sistemde ara katman yazılımı, kütüphaneler ve API C diliyle yazılmıştır. Uygulama yazılımları ise, Apache harmony üzerine kurulu java-uyumlu kütüphaneler ihtiva eden uygulama iskeleti üzerinden çalışır. Android, derlenmiş java kodunu çalıştırmak için dinamik çevirmeli (JIT) Dalvik sanal makinasını kullanır ve cihazların fonksiyonerliğini artıran uygulamaların geliştirilmesi için çalışan geniş bir programcı-geliştirici çevresine sahiptir.
Android uygulama geliştirme ortamı Android SDK’ dır. Uygulama yazabilmek için SDK, Eclipse ve Java Development Kit’ i bilgisayara yüklemek gerekmektedir.
Android SDK, android uygulamaları geliştirmek için gereken tüm kütüphane ve ara programları bulundurur. Tam açılımı Android Software Development Kit yani Android Yazılım Geliştirme Kit’ idir.
Eclipse, açık kaynak kodlu bir tümleşik geliştirme ortamıdır. Ana odak noktası Java ve Java ile ilişkili teknolojiler olsa da esnek yapısı sayesinde C ve Python gibi farklı diller için de kullanılmaktadır. Java kodlarının derlenmesi ve çalıştırılması için kullanılmaktadır. Android SDK ile bütünleşik çalışan Eclipse'in içinde yazılan programları denemek için emulator (sanal telefon) kurulabilmektedir.
Java Development Kit (JDK) java geliştiricilerine yönelik Oracle Corparation ürünüdür. Java diliyle yazılım geliştirme ortamıdır.
Android SDK Kurulumu
1- Android SDK, Eclipse üzerine kurulur. Bu yüzden ilk olarak JDK programı sitesinden indirilir ve bilgisayara kurulur.
2- Eclipse IDE sitesinden “Eclipse IDE for Java Developers” ismiyle indirilir (Şekil 1).

3- Android SDK kurulur. developer.android sitesinden SDK sekmesine tıklanır ve indirilir (Şekil 2). Bilgisayara yüklerken program dosyasının nereye kurulduğu not edilmelidir. Kurulumun son aşamasında güncelleştirmelerin yapılmasını istiyor musunuz diye bir kutucuk çıkar. Bu onaylanır ve istenen dosyalar için güncelleme yapılır (Şekil 3). Bu işlem daha sonra SDK Manager çalıştırıldığında da yapılabilir.


4- Android Development Tools ( ADT) kurulur. Bu iki şekilde yapılabilir. İlk yöntem direk olarak developer.android.com adresinden indirilir ve kurulur. Diğer yöntem Eclipse programı üzerinden sırasıyla “Help>Install New Software” linklerine girilir. Açılan pencereden sağ üstte gözüken “Add” butonuna basılır. Açılan “ Add Repository” dialog penceresinde isim alanına “ADT Plugin”, Location alanına https://dl-ssl.google.com/android/eclipse/ adresi girilir (Şekil 4).

5- Çıkan pencereden “Developer Tools” seçilir ve devam edilir. Lisans anlaşması kabul edilir.
6- Kurulum tamamlandıktan sonra Eclipse yeniden başlatılır.
7- Android SDK yolu Eclipse bildirilir. Bunun için Eclipse’ ten sırasıyla Window>Preferences yolu takip edilir. Açılan pencerede sol taraftaki listeden Android seçilir ve SDK Location yazan yere bilgisayarınızdaki SDK’ nın yolu girilir. “Apply” linkine tıklandığında bilgisayarınızda kurulu olan SDK platformlarını görülür. Eğer Android SDK kurulumundan sonra SDK Manager’a güncelleme yapılmamışsa bu liste boş gözükecektir (Şekil 5).
8- Kullanılan android sürümleri için gerekli programlar Eclipse üzerinden direk olarak da indirilebilinir. Eclipse araç çubuklarından “Window>Android SDK Manager” seçilir (Şekil 6). Açılan pencerede istenilen sürümler işaretlenerek indirilir.
9- ADT programlarını Eclipse üzerinden yüklemek için araç çubuklarından “Help>Install New Software” seçilir. Add butonuna tıklanır. Name kısmına herhangi bir şey yazılabilir fakat Location kısmına https://dl-ssl.google.com/android/eclipse/ adresi girilir. Açılan sayfadaki programların yanındaki kutucuklar işaretlenir ve Next denilerek işlem tamamlanır.


Android, linux çekirdeği üzerine inşa edilmiş bir mobil işletim sistemidir, bu sistemde ara katman yazılımı, kütüphaneler ve API C diliyle yazılmıştır. Uygulama yazılımları ise, Apache harmony üzerine kurulu java-uyumlu kütüphaneler ihtiva eden uygulama iskeleti üzerinden çalışır. Android, derlenmiş java kodunu çalıştırmak için dinamik çevirmeli (JIT) Dalvik sanal makinasını kullanır ve cihazların fonksiyonerliğini artıran uygulamaların geliştirilmesi için çalışan geniş bir programcı-geliştirici çevresine sahiptir.
Android uygulama geliştirme ortamı Android SDK’ dır. Uygulama yazabilmek için SDK, Eclipse ve Java Development Kit’ i bilgisayara yüklemek gerekmektedir.
Android SDK, android uygulamaları geliştirmek için gereken tüm kütüphane ve ara programları bulundurur. Tam açılımı Android Software Development Kit yani Android Yazılım Geliştirme Kit’ idir.
Eclipse, açık kaynak kodlu bir tümleşik geliştirme ortamıdır. Ana odak noktası Java ve Java ile ilişkili teknolojiler olsa da esnek yapısı sayesinde C ve Python gibi farklı diller için de kullanılmaktadır. Java kodlarının derlenmesi ve çalıştırılması için kullanılmaktadır. Android SDK ile bütünleşik çalışan Eclipse'in içinde yazılan programları denemek için emulator (sanal telefon) kurulabilmektedir.
Java Development Kit (JDK) java geliştiricilerine yönelik Oracle Corparation ürünüdür. Java diliyle yazılım geliştirme ortamıdır.
Android SDK Kurulumu
1- Android SDK, Eclipse üzerine kurulur. Bu yüzden ilk olarak JDK programı sitesinden indirilir ve bilgisayara kurulur.
2- Eclipse IDE sitesinden “Eclipse IDE for Java Developers” ismiyle indirilir (Şekil 1).
Şekil 1
3- Android SDK kurulur. developer.android sitesinden SDK sekmesine tıklanır ve indirilir (Şekil 2). Bilgisayara yüklerken program dosyasının nereye kurulduğu not edilmelidir. Kurulumun son aşamasında güncelleştirmelerin yapılmasını istiyor musunuz diye bir kutucuk çıkar. Bu onaylanır ve istenen dosyalar için güncelleme yapılır (Şekil 3). Bu işlem daha sonra SDK Manager çalıştırıldığında da yapılabilir.
Şekil 2
Şekil 3
4- Android Development Tools ( ADT) kurulur. Bu iki şekilde yapılabilir. İlk yöntem direk olarak developer.android.com adresinden indirilir ve kurulur. Diğer yöntem Eclipse programı üzerinden sırasıyla “Help>Install New Software” linklerine girilir. Açılan pencereden sağ üstte gözüken “Add” butonuna basılır. Açılan “ Add Repository” dialog penceresinde isim alanına “ADT Plugin”, Location alanına https://dl-ssl.google.com/android/eclipse/ adresi girilir (Şekil 4).
Şekil 4
5- Çıkan pencereden “Developer Tools” seçilir ve devam edilir. Lisans anlaşması kabul edilir.
6- Kurulum tamamlandıktan sonra Eclipse yeniden başlatılır.
7- Android SDK yolu Eclipse bildirilir. Bunun için Eclipse’ ten sırasıyla Window>Preferences yolu takip edilir. Açılan pencerede sol taraftaki listeden Android seçilir ve SDK Location yazan yere bilgisayarınızdaki SDK’ nın yolu girilir. “Apply” linkine tıklandığında bilgisayarınızda kurulu olan SDK platformlarını görülür. Eğer Android SDK kurulumundan sonra SDK Manager’a güncelleme yapılmamışsa bu liste boş gözükecektir (Şekil 5).
8- Kullanılan android sürümleri için gerekli programlar Eclipse üzerinden direk olarak da indirilebilinir. Eclipse araç çubuklarından “Window>Android SDK Manager” seçilir (Şekil 6). Açılan pencerede istenilen sürümler işaretlenerek indirilir.
9- ADT programlarını Eclipse üzerinden yüklemek için araç çubuklarından “Help>Install New Software” seçilir. Add butonuna tıklanır. Name kısmına herhangi bir şey yazılabilir fakat Location kısmına https://dl-ssl.google.com/android/eclipse/ adresi girilir. Açılan sayfadaki programların yanındaki kutucuklar işaretlenir ve Next denilerek işlem tamamlanır.
Şekil 5
Şekil 6
16 Şubat 2014 Pazar
Kontrol Kartı (Uçuş Kontrol Kartı)
Multikopter sistemlerinde kullanılan malzemeler arasında en
önemli olanı kontrol kartıdır. Çünkü çok rotorlu araçlarda kontrol işlemi
uçaklarda olan sistemlerden daha karmaşık ve zordur. Yapılacak hava aracının
hangi amaçla kullanılacağına göre kontrol kartını seçmek gerekir. Bu sebepten
kullanılan kontrol kartlarının özellikleri iyi analiz edilmelidir.
Piyasa da kullanılan kontrol kartlarından bazıları şu
şekildedir:
•
Ardupilot
•
DJI
Wookong Multi Rotor (WKM)
•
Paparazzi
Pilot
•
DJI
Naza
•
KK
Multicopter
•
Multi
wii
•
ZERO
TECH
•
MegaWAP
•
Shrediquette
•
Open
copter control
•
Mikrocopter
Pervane (Propeller)
Hızın etkisiyle taşıma kuvvetini
üreten taşıyıcı yüzeylere başka bir deyişle döner kanatlara
pervane denir. Quadrokopterlerde 2 tip pervane kullanılır.
1.
Saat
yönü dönen (clockwise)
2.
Saat
yönü tersi dönen (counter clockwise)
2 farklı dönüş yönüne sahip pervane kullanılmasının sebebi
yukarıda da anlatıldığı gibi quadronun gövde üzerinde oluşturmuş olduğu anti
tork etkisini yok etmektir. Fakat piyasada genelde imalat açısından kolay
olması sebebi ile tek tip pervane üretilmesi, istenen pervane ölçülerinin bulunmasını
güçleştirmektedir. Bu sebepten farklı çözüm yolları olsa da en sağlıklısı uygun
pervanelerin kullanılmasıdır.
Pervane seçiminde, kullanılan motorun özellikleri ana
parametredir. Özellikle Kv değerine göre pervane seçimi yapılması ve motor
özellik çizelgesindeki pervanelerin kullanılması verimlilik açısından önemlidir.
Kv değeri küçük olan yani devir sayısı az olan motorlarda gerekli taşımayı
oluşturması açısından Kv değeri büyük olan motorlara göre daha büyük pervane
kullanılır. Şekil 1’de E-MAX BL 2826 tipinde bir motor ile kullanılması
gereken pervaneler ve akım-voltaj durumlarına göre ürettiği itki değerleri
bulunmaktadır.

Şekil 1
Pervaneler,
boy ve burulma açılarına göre isimlendirilirler. Yani üzerlerinde iki ayrı
numara vardır. Örneğin 12x6 pervane demek 12 inch boyunda ya da çapında 6 inch
burulma açısına sahip bir pervane demektir. Burulma açısı, pervanenin 360
derecelik dönüşünde ilerlediği mesafe değeridir. Bu değerler bazen mm cinsinden
de verilmektedir. Fakat belirtilmediği durumlarda inch olarak kullanılır.
Pervanelerde burulma açısına göre
bazı özellikler elde edilir. Örneğin burulma açısı yüksek pervaneler yavaş süratlenip
hızlı uçuş sağlarlar. Bunun yanında motor durduğunda pervane hızı geç yavaşlar.
Burulma açısı küçük pervaneler ise çabuk hızlanırlar, yavaş uçuş sağlarlar,
basit motor devir kontrolü sunarlar.
Modellerde kullanılan yapım malzemelerine göre pervane
tipleri;
Ø
Naylon
pervaneler
Ø
Plastik
pervaneler
Ø
Karbon
pervaneler
Ø
Karbon-fiber
pervaneler
Ø
Ahşap
pervaneler
Ø
Fiberglass
pervaneler
Ø
Metal
pervaneler
şeklindedir.
Naylon ya da plastik pervaneler esnek olmaları sebebi ile kalitesizdirler. Fakat ucuz olmalarından dolayı özellikle ilk denemelerde, pervane kırımı fazla olabileceğinden kullanılmasında fayda vardır. Bu pervanelerin kullanılması durumunda kenarlarında kalan keskin çapaklar zımpara ile temizlenmelidir.
Ahşap pervaneler diğerlerine göre hafif ve az esnek
olduklarından motor üzerine az yük bindirirler. Böylece diğer pervanelere göre
daha yüksek devir sayılarına ulaşabilirler. Esnek olmaları sessiz çalışmalarına
da bir etkendir. Fakat yeni başlayanlar için uygun değildirler. Çünkü çok çabuk
kırılırlar.
Karbon-fiber pervaneler hafif, esnek olmayan verimli
pervanelerdir. Tek dezavantajı fiyatlarının yüksek olmasıdır.
Fiberglass pervaneler karbon ve ahşap pervanelere göre ucuz
plastik pervanelerden verimli, ağır ve esnek pervanelerdir. Kullanılması
halinde keskin yüzeyleri zımparalanmalıdır.

Şekil 2
Fırçasız (Brushless) Motorlar
Elektrik motorları elektriğin manyetik alan özelliğini
kullanarak elektrik enerjisini mekanik enerjiye dönüştüren makinelerdir.
Fırçasız motorlar adından da anlaşılacağı gibi fırça olmadan elektronik
aksamlar içeren motorlardır. Bunların, fırçalı motorlardan farkı akım
çeviricilerin fırça değil elektronik olmasıdır. Daha sessiz çalışmaları, fırçaların
meydana getirdiği sürüklemenin ve ısıdan kaynaklanan kayıpların, fırçaların
meydana getirdiği kıvılcımların olmaması, kolay soğutulabilmeleri fırçalı
motorlara göre üstünlükleridir.
Fırçasız motorlar diğer DC motorlar gibi direk bataryaya bağlanarak
çalıştırılamazlar. Böyle bir yanlışlığın yapılması motorun yanmasına neden
olur. Bu sebepten fırçasız motorların çalıştırılabilmesi için ESC’lere ihtiyaç
duyulur.
Fırçasız motorlar inrunner ve outrunner olmak üzere ikiye ayrılırlar. Inrunner motorlar, rotoru motorun merkezinde olan sabit sargıları dış kısımda bulunan motorlardır. Yani motorun dış çeperi sabitken iç kısmı hareket eder. Outrunner motorlarda ise motor sargıları motorun merkezinde ve sabitken, rotor üzerinde mıknatısları da barındıracak şekilde motorun dış çeperindedir.Yani motorun dış kısmı hareket ederken iç kısmı sabittir. Genellikle multikopter sistemlerinde kullanılan fırçasız motor tipleri outrunnerdır (Şekil 1).

Şekil 1
Motor etiket bilgileri
Motorların özelliklerini içeren bazı parametreler vardır.
Bunlardan ilki V kısaltmasıyla anılan elektrik akımının basıncı olarak
tanımlanan potansiyel farktır. Yani kısaca gerilim değerini gösterir. Modelcilikte
kullanılan motorlar üzerinde ya da özellik tablosunda genellikle voltaj
değerleri lipo pil hücre sayısına göre verilir.
İkinci parametre akım değeridir. A kısaltmasıyla anılan
amper bir noktadan birim sürede akan elektrik yük miktarını gösterir. Yani
birim zamandaki yük miktarına akım denir. Bu parametreye göre ESC ve pil simi
yapılır.
Üçüncü parametre güç değeridir. W kısaltmasıyla anılan watt
motorun pervaneyi çevirebilmesi için ihtiyaç duyacağı gücü ifade eder. Akım ve
gerilimin çarpılmasıyla elde edilir.
Kv değeri fırçasız elektrik motorları için geçerli olan
devir katsayısını gösteren değerdir. Voltaja göre devir sayısının
hesaplanmasını sağlar. Yani motorun 1V başına 1 dakikada çevireceği devir
sayısını gösteren parametredir. Örneğin 10 V ile çalışan bir motorun Kv değeri
700 ise bu motorun dakikadaki devir sayısı= 10x700=7000 devir/dakika’ dır.
Genellikle dev/dakika yerine rpm (revolution per minute) kullanılır.
Diğer bir parametre Kt değeri diye tabir edilen tork
katsayısıdır. Bu değer bir motorun amper başına vereceği tork değerini
ounce-inch cinsinden ifade eder. Örneğin 0,60 oz-inc/A Kt değerine sahip bir
motor 10 A de 6 oz-inc tork verir.
Kv değeri ile Kt değeri arasında ters orantı vardır. Yani Kv
değeri yüksek olan bir motorun amper başına vereceği tork değeri düşük olur. Bu
sebepten yüksek Kv değerli motorlarda tork değerinin artırılması için küçük
pervaneler ya da ek dişli sistemleri kullanılmalıdır.
Fırçasız motorların etiketlerinde ya da özellikler
tablosunda optimum verim için kullanılması gereken pervane ölçütleri de belirtilir.
Kullanılacak pervanelerin bu özellikler dahilinde olması verimi artırmaktadır.
ESC (Elektronik Hız Kontrolcüsü)
Fırçalı
ve fırçasız motorların hızını ayarlayan, hız kontrol ünitesidir. Diğer bir
ifade ile pilden aldıkları elektrik
enerjisini, alıcının gaz kanalından aldığı sinyal ile sürerek motorlara ileten
ve motor devrini kontrol eden hız kontrolcüleridir.
Elektrikli DC motorlarda (fırçalı motorlar) motor hız
kontrolü, voltaj kontrolü ile gerçekleşir. Voltajın artırılıp azaltılmasına
göre motor hızı değişir. Bu işlem fazlasıyla zor ve ısı açığa çıkaran verimsiz
bir yöntemdir.
Multikopter sistemlerinde kullanılan fırçasız motorlar bilinen 3 fazlı motorlardır. Bu motorlarda kullanılan ESC’ler daha kompleks olup, pilden aldığı DC gerilimi 3 fazlı AC (Alternatif akım) gerilime çevirerek ve kumandadan gönderilen sinyale göre devri değiştirerek motoru sürerler. Fırçasız motorlarda kullanılan bu ESC’ler motor devrini PWM (pulse width modulation) yöntemiyle değiştirirler. Bu yöntem sayesinde fırçalı motorlarda kullanılan voltaj- hız ilişkisi ile devir değiştiren ESC’lerin meydana getirdiği ısı problemi ve verimlilik sorunu kısmen ortadan kalkar. PWM metodu darbe genişlik modülasyonu olarak bilinir. Kumandadan alınan dijital sinyalin pulse genişliği değiştirilerek, motora giden gerilim değeri dolaylı yönden frekans kontrolü ile yapılır. Pulse genişliğini değiştirme işlemi ESC nin çıkış akımını sürekli açıp kapatmasıyla gerçekleşir. Yani motora giden voltaj çıkış akımının ne kadar süre gönderilip ne kadar süre kesildiğiyle alakalıdır. Örneğin, 1 saniyelik zaman süresince 10 V pile bağlı bir ESC-motor bağlantısında kumanda gaz kolu %60 da iken, ESC akımı, saniyenin 6/10 unda açacak 4/10 unda kapatacaktır. Böylece motora sürekli 10 V gitmeyecek ve 1 saniyede giden voltajın ortalamasına göre motorun devri değişecektir. ESC’ lerde 1 saniyedeki akım değişiminin yüksek olması istenir. Yani ESC’lerin üzerlerinde yazan KHz değerleri ne kadar yüksekse yenileme frekansı denilen saniyedeki akım açma kapama sayısı da o kadar fazla olur. Bu sebepten tercih edilecek ESC’nin yenileme frekansı yüksek olmalıdır. Fırçasız motorlarda kullanılan ESC’lerin girişinde 2, çıkışında 3 motor kablosu 3 BEC ve 1 sinyal kablosu bulunmaktadır (Şekil 1). Girişte bulunan 2 kablo, kırmızı uç + eksi uç – olmak üzere pile bağlanır. Çıkıştaki 3 kalın kablo motorlara bağlanır ve herhangi ikisinin yerinin değiştirilmesiyle motor yönü değiştirilebilir. Diğer 3 ince kablodan kırmızı ve siyah olanı ESC içerisindeki 5V, 3A ya da 5A çıkış veren regülatör devre çıkışlarıdır. 5V’u sağlayan regülatör devresine BEC (battery eliminator circuit) ya da UBEC de denilmektedir. Alıcıları ya da kontrol kartlarını beslemek için kullanılan bu çıkışlar alıcı kanallarına bağlanır ve 5V ile çalışan sistemleri, kontrol kartlarını besler. Diğer beyaz ya da sarı renkli ince kablo ESC sinyal kablosudur. Alıcının sinyal çıkışına bağlanarak ESC’ye vericiden gönderilen sinyali iletir. Böylece ESC motorun hızını kumandadan gönderilen sinyale göre değiştirir.
Şekil 1
ESC voltaj değerleri genellikle kullanılabilecek lipo pillerin hücre sayısına göre üzerlerinde yazar. Bu sebepten kullanılacak ESC ile lipo pil arasında uyum olması gerekir.
ESC akım değeri bir ESC’nin verebileceği maksimum akımı ifade eden değerdir. Bazı ESC’lerde sürekli ve yanma akımı şeklinde 2 değer verilebilir. Bunlardan sürekli olan yani az olan değer ESC’nin sürekli olarak motora verebileceği akım değerini yanma akımı ise anlık olarak verebileceği akım değerini gösterir. Bu yüzden ESC seçiminde kullanılacak motorun maksimum çekeceği akım değeri dikkate alınmalıdır. Ayrıca ESC akımının motorun çekeceği maksimum akımdan %10 fazla olması ısınmaları ve ESC’nin yanma riskini de azaltabilir.
ESC’ler barındırdıkları bazı özellikler sayesinde programlanabilirler. Bu konu uygulama alanında detaylıca anlatılmıştır.
Lion Polimer (LİPO) Piller
Lion
Polymer Pil (LİPO)
Lipo piller doğadaki en hafif metal olan lityum maddesinden
üretilirler. Yoğunluğu (0.535 g/cm3)
en düşük katı madde olarak da bilinen lityum elementi bir alkali metaldir. Su
veya su buharı ile karşılaştığında tepkimeye girerek hidrojen açığa çıkarır,
ortamda oksijen de varsa alev alabilir. Ateşe tutulduğunda ise önce kırmızı bir
parlama görünür, ardından parlak beyaz renkte kuvvetli bir alevle yanar.
Yani herhangi bir yangın olayında kesinlikle su ile müdahale edilmemelidir ve
kullanımı esnasında oldukça dikkat edilmelidir. Eğer yangın tehlikesiyle karşı
karşıya gelinirse D tipi diye anılan hafif metal yangın söndürücüleri
kullanılmalıdır. Genellikle kuru kimyevi tozlar bu kategoriye girmektedir.
Lipo
bataryalar küçük hacimlerde daha fazla enerji depolama kapasitesine sahip
olduklarından elektrikli hava araçlarında en fazla kullanılan pil çeşididir. Kg
başına 720,000 Joule enerji depolama kapasitesiyle, piyasada en fazla
kullanılan nikel metal hydride pillerden yaklaşık 430,000 Joule daha fazla
enerji depolama kapasitesine sahiptir.
Lipo bataryalar kullanılmadıkları süre zarfında
az miktarda deşarj olurlar. Hemen hemen günde şarjının %0,01 ini deşarj ederek
piller arasında en iyi orana sahip olurlar.
Lipo pillerin hücre başına düşen gerilim değeri
de diğer pillere göre fazladır. Lipo pillerde hücre başına optimum 3.7 V
gerilim değeri düşse de tamamen şarj edilmiş bir lipo da hücre başı gerilim 4.2
V değerine çıkmaktadır (Şekil 1).

Şekil 1
Lipo bataryalar hücre sayılarına ve enerji depolama kapasitelerine
göre adlandırılmaktadır. Hücre başı gerilim değeri 3,7 V olarak
hesaplanmaktadır. Yani 3S pil denildiğinde bu 3,7 x 3= 11,1 V gerilim değerine
denk gelmektedir (gerilim değeri =3,7 x hücre sayısı). Burada ‘S’ kısaltması 3
hücrenin seri bağlandığını ifade etmektedir. 3S2P gibi bir adlandırma var ise
bu 3 hücrenin seri ve bunların ikili şekilde paralel bağlandığını ifade eder.
Yani toplamda 6 hücre vardır. Gerilim değeri yine 3,7 x 3= 11,1 V tur. Fakat
paralel bağlantıdan dolayı akım kapasitesi artmıştır. Enerji depolama
kapasiteleri ise mAh (mili amper saat) cinsinden ifade edilir. Yani 1 saatte
vereceği akım değerini gösterir. Örneğin Şekil 4.1 deki pil 3300 mAh değerine
sahiptir. Yani bu pil saatte 3300 miliamper ya da 3,3 Amper akım verebilme kapasitesine
sahiptir. Eğer pil 3S2P olsaydı saatte vereceği akım kapasitesi 2 katı olurdu
yani saatte 6,6 A akım verebilme kapasitesine sahip olurdu.
Lipo bataryalarda ayrıca C değeri bulunur. C değeri
bataryanın elektrik yükünü ne kadar hızda boşaltabileceğini gösterir. Yani C
değeri arttıkça bataryanın elektrik yükünü boşaltabilme kapasitesi artar.
Örneğin elinizde 20 A akım çeken bir motorunuz ve 2000 mAh kapasitesine sahip
bir piliniz var. Motorunuzu bu pille çalıştırmanız için C değerinin en az 10 C
olması gerekir. 2000 x 10 = 20,000 mAh yani saatte 20 A akım verebilir. Lipo
pillerde genellikle iki C değeri bulunur. Bunlardan ilki lipo pilin sürekli
verebileceği akım değerini, diğeri ise burst akımı denilen anlık olarak
verebileceği akım değerini gösterir.
Bataryalarda raf ömrü, bir bataryanın kullanılmadığı durumda ne kadar sürede öleceğini gösterir. Lipo bataryalar bu anlamda oldukça başarılıdır ve gün geçtikçe yapılan çalışmalarla da raf ömrü süresi artırılmaktadır. Lipo bataryalarda raf ömrü ölçütü iç dirençle alakalıdır. Bataryanın iç direnci ne kadar düşükse raf ömrü o kadar fazladır. İç dirence kullanıcıların etkisi de olmaktadır. Yani bataryanın uygun
sıcaklıkların üzerinde saklanması iç direncin artmasına, böylece raf ömrünün
kısalmasına ya da kullanılacak kapasitenin azalmasına sebep olur. Ek olarak
bataryalar uzun süre kullanılmazsa %40- 50 şarj seviyesinde bırakılıp daha
düşük iç dirence maruz kalması sağlanır. Yani kullanıcıların raf ömrü konusunda
dikkat etmesi gereken noktalar, bataryaları %40-50 şarj seviyesinde bırakmak ve
oda sıcaklığında saklamaktır.
Bir pili tüm özellikleriyle inceleyelim. Pilimiz 4S2P 5000
mAh 30C-50C olsun;
Gerilim değeri: 3,7V x 4= 14,8 V
Akım değeri : 5000 x 2=10,000 mAh. Yani saatte 10 A akım
verebilir.
Sürekli verebileceği akım kapasitesi (deşarj oranı) :10,000
x 30C =300,000 mAh. Yani saatte sürekli olarak 30 A akım verebilir.
Yanma akımı: 10,000 x 50C=500,000 mAh. Yani anlık olarak 50
A akım verebilir.
Lipo pil kullanımında dikkat edilmesi gereken kurallar:
Ø
Lipolar
kullanılacak aracın üzerinde korumaya alınmalıdır. Bir kırım sonucu zedelenmesi
su ile teması yangınlara sebep olabilir.
Ø
Motorların
çekeceği akım değerine göre uygun kapasiteli piller seçilmelidir. Aksi takdirde
pil şişer ve kullanılamaz hale gelir. Yangın tehlikesi olabilir.
Ø
Uzun
süre kullanılmaması durumunda oda sıcaklığında ve %40-50 şarjlı olarak
saklanmalıdır.
Ø Şarj esnasında hücrelerin eşit
miktarda dolması için balanslı şarj aletleri kullanılmalıdır ve hücrelerden
çıkan kontrol kabloları şarj aletine takılmalıdır (Şekil 2).

Şekil 2
Ø
Uygun
akım değerinde şarj edilmelidir. Yani şarj esnasında kaç amper akım basılacağı
oldukça önemlidir. Örneğin 3S 3300 mAh lık bir pil 1C değerine göre şarj
edilmelidir yani 11,1 V ile 3,3 A lik akım basılarak şarj etme işlemi
yapılmalıdır (Şekil 4.2). Bu akımı karşılayacak şarj aleti de buna uygun
olmalıdır. Yani şarj aletinin gücü en az teoriye göre 3.3x11,1= 36,63 Watt
olmalıdır. Fakat şarj etme işleminde her zaman pilin o anki gerilim değerinden
daha fazla gerilim verilmesi gerekir. Buna göre pilin tam şarjda gerilim değeri
3x4,2 =12,6 V olacağından gerekli güç 12,6 x 3,3= 51,58 watt olmalıdır. Fakat
şarj aletinin verimi de hesaba katılarak bu pilin şarj edilebilmesi için şarj
aletinin gücünün 60 watt civarında olması pratikte uygundur.
Ø
Lipo
piller ilk 5 kullanım için %50 den fazla boşaltılmadan şarj edilmelidir. İlk
kullanımlara rodaj evresi de denilmektedir. Dolu bir pilin hücre voltajı 4,2
V’tur, pil bittiğinde ise hücre voltajı 3,7 V olur. Buna göre deşarj kapasitesi
4,2 - 3,7 =0,5 V tur. Rodaj evresinde 0,5’V un yarısı 0,25 V kullanılmalıdır
yani hücre gerilimi 4,2 – 0,25 = 3,95 civarına düştüğünde pil tekrar şarj
edilmelidir.
Ø
İlk
5 kullanım için piller 1C değerinin %80 altında şarj edilmelidir. Yani 3300 mAh
lık pil 3.3 A değerinin %80 i değerde 2,64 A ile şarj edilmelidir.
Ø
Pillerin
kırmızı (+ uç) ve siyah uçları (- uç) kesinlikle kısa devre edilmemelidir.
Ø
Eğer
hücre başı voltaj 3.5 V’un altına düşmüşse ve kullanılamayacak hale gelmişse
yani şarj aleti uyarı veriyorsa (genellikle Battery check, Low voltage uyarısı)
tasnif edilmeyen bir yöntem de olsa pilleri nikel metal hiydride şarj aleti ile
5 dk civarında şarj edip tekrar lipo şarj aletine bağlanmalıdır. Şarj boyunca
pilin yanından ayrılmamalıdır. Yangın tehlikesi olabilir.
Ø
Lipo
şarjı esnasında pilin yanında bulunmak gerekir. Herhangi bir aksilik durumun da
yangın tehlikesi diğer pillere oranla daha fazladır.
Kaydol:
Kayıtlar (Atom)